


當(dāng)前位置:首頁(yè) > 新聞中心 > 行業(yè)動(dòng)態(tài)
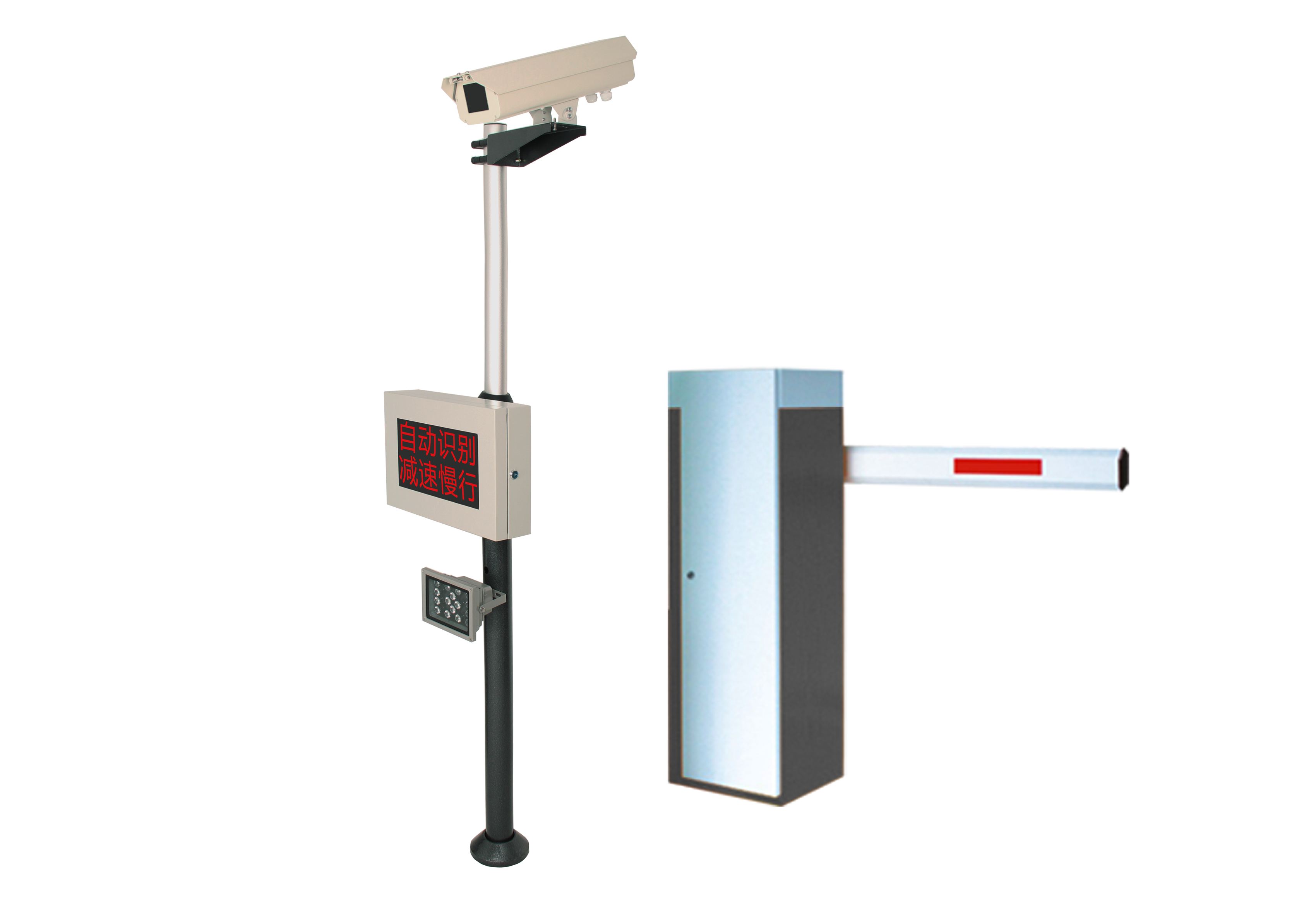
車(chē)牌識(shí)別系統(tǒng)的觸發(fā)方式
一般情況下停車(chē)場(chǎng)車(chē)牌識(shí)別系統(tǒng)都是由早期的圖像處理技術(shù),在后期傳統(tǒng)模式識(shí)別技術(shù)及人工神經(jīng)網(wǎng)絡(luò)技術(shù)。
圖像處理技術(shù):運(yùn)用圖像處理技術(shù)解決車(chē)牌識(shí)別系統(tǒng)的研究最早始于80年代,但國(guó)內(nèi)外均只是就車(chē)牌識(shí)別系統(tǒng)中的某一個(gè)具體問(wèn)題進(jìn)行討論,并且通常僅采用簡(jiǎn)單的圖像處理技術(shù)來(lái)解決,并沒(méi)有形成完整的系統(tǒng)體系,識(shí)別過(guò)程是使用工業(yè)攝像機(jī)拍下汽車(chē)的前方圖像,然后交給計(jì)算機(jī)進(jìn)行簡(jiǎn)單的處理。
國(guó)內(nèi)多數(shù)車(chē)牌識(shí)別系統(tǒng)有兩種觸發(fā)方式,一種是外設(shè)線圈觸發(fā),另一種是視頻觸發(fā)。
工作方式是指采用線圈、紅外或車(chē)輛檢測(cè)器通過(guò)信號(hào),車(chē)牌識(shí)別系統(tǒng)接受到車(chē)輛觸發(fā)信號(hào)后,采集車(chē)輛和車(chē)牌圖像,自動(dòng)識(shí)別車(chē)牌進(jìn)行后續(xù)處理。該方法的優(yōu)點(diǎn)是觸發(fā)率高,性能穩(wěn)定;缺點(diǎn)是需要切割地面鋪設(shè)線圈,施工量大。
視頻觸發(fā)方式
是指車(chē)牌識(shí)別系統(tǒng)采用動(dòng)態(tài)運(yùn)動(dòng)目標(biāo)序列圖像分析處理算法技術(shù),實(shí)時(shí)檢測(cè)車(chē)道上車(chē)輛移動(dòng)狀況,發(fā)現(xiàn)車(chē)輛通過(guò)時(shí)捕捉車(chē)輛圖像,識(shí)別車(chē)牌照,并進(jìn)行后續(xù)處理。視頻觸發(fā)方式不需借助線圈、紅外或其他硬件車(chē)輛檢測(cè)器。該方法的優(yōu)點(diǎn)是施工方便,不需要切割地面鋪設(shè)線圈,也不需要安裝車(chē)檢器等零部件,但其缺點(diǎn)也十分顯著,由于算法的極限,該方案的觸發(fā)率與識(shí)別率較之外設(shè)線圈觸發(fā)都要低很多。
